
Linie folgen – Konzepte zur Realisierung
Benjamin AunkoferDer Roboter, basierend auf dem RP6, soll zuerst einer Linie folgen können. Die Linie ist der Führungsbefehl und ferner auch die Interaktionsschnittstelle zwischen Mensch (bzw. menschlicher Anweisung) und dem Roboter. Die Linie ist eine grafische Anweisung an den Roboter.
Die Linie soll im ersten Schritt keine Abzweigungen haben und somit keine Entscheidungsfunktion bedingen.
Art der Linie
Es sind denkbar viele Realisierungsmöglichkeiten vorhanden. So könnte eine linienartige einspurige Schiene gesetzt werden, welche sich mit Tastern örtlich bestimmen lässt und sich der Roboter so selbst über diese Bahn lenkt.
Die einfachste Variante der Linie dürfte aber eine schwarze Linie sein, welche mit einem handelsüblichen Buntstift auf einem hellen Untergrund gemalt wird. Diese Form der Richtungsanweisung ist ohne Frage auch sehr flexibel und daher die Form, welche für diesen Roboter angewendet wird.
Hardware zur Realisierung
Es kommen dafür zwei Konzepte in Frage:
- Primitive Sensoren, welche abhängig vom Lichteinfach Spannung/Strom oder den elektrischen Widerstand ändern. Drei primitive Sensoren-Elemente stehen hierbei mit unterschiedlichen Tendenzen hinsichtlich Reaktionszeit und Empfindlichkeit in Konkurrenz und kämen für den Einsatz zur Linien-Erkennung in Frage.
- Photodiode – Ein Halbleiter, welcher Licht in einen elektrischen Strom umwandelt
- Phototransistor – Ähnlich der Photodiode, jedoch empfindlicher (vom Prinzip her eine Photodiode mit Verstärker)
- Photowiderstand – Ändert seinen elektrischen Widerstand bzw. Leitwert empfindlich je nach einfallender Lichtintensität. Der Leitwert erhöht sich mit Zunahme der Lichtintensität.
- Kompakte Kamera
Eine Kamera liefert viele Bildpunkte liefert, welche insgesamt ein Bild ergeben. Somit lassen sich komplexe Linien (grafische Anweisungen) erkennen. Mit einer Kamera betreten wir das Gebiet der digitalen Bildverarbeitung durch eingebettete Systeme, eine sehr umfangreiche eigenständige Disziplin, welche jedoch auch in Rahmen dieses Projekts angekratzt werden darf.
Gegenüberstellung beider Konzepte:
| Sensoren | Kamera | |
|---|---|---|
| Kosten | eher gering | eher hoch |
| Informationsumfang | gering bis mittel | hoch |
| Programmieraufwand | gering | hoch |
| Reaktionsgeschwindigkeit | sensor-abhängig | kamera-abhängig |
Umsetzung
Es könnten insgesamt zwei Realisierungsvorschläge aus jeweils beiden Konzepten umgesetzt werden. Als Hauptziel, welches für weiterführende Aufgaben benutzt wird, wird der Umsetzungsvorschlag nach dem 1. Konzept angestrebt. Optional kann noch der Umsetzungsvorschlag basierend auf dem 2. Konzept angeschnitten werden. Dann können beide Verfahren miteinander verglichen werden.
Umsetzungsvorschlag nach dem 1. Konzept:
Der RP6 verfügt bereits über einen IR-Sensor und zusätzlich über Photowiderstände, welche jedoch nicht nach unten zum Boden gerichtet sind. Es gibt Ansätze, den Boden mit weiteren LEDs zu bestrahlen und die Reflexionen vom Boden mit Spiegeln zu den Photowiderständen umzuleiten. Die voneinander getrennten Widerstände können so Helligkeitsunterschiede am Boden feststellen.
 |
– zentraler IR-Empfänger |
 |
– zwei nach seitlich-außen geneigte Photowiderstände |
Der Roboter-Bausatz ASURO hat ein fest integriertes Konzept mit Phototransistoren. An der Unterseite von ASURO befinden sich zwei Phototransistoren (SFH 300) zwischen einer beleuchtenden roten LED.
![]()
Dieser Aufbau beim ASURO kann einfach beim RP6 angewendet werden, indem eine kleine Platine (oder sonstige Steckverbindung) mit der LED und den beiden Phototransistoren vorne an die Unterseite des RP6 montiert wird. Die LED wird dann an einen I/O-Port, die Phototransistoren an jeweils einen ADC-Port (Analog-Digital-Converter) des AtMega32-Controllers angeschlossen.
Bei der Programmierung des Programms zur Linienverfolgung kann dann an die vielen bestehenden Lösungen beim ASURO angelehnt werden und gilt damit als recht einfach.
Umsetzungsvorschlag nach dem 2. Konzept:
Die Erkennung der Linie mit Hilfe von Bildpunkten von einer digitalen Kamera ist weit komplexer, dafür bieten diese jedoch auch weit bessere Möglichkeiten zur Orientierung. Die Genauigkeits-Ausbeute ist dann weniger Frage der Kamera (natürlich spielt diese ebenfalls eine Rolle), sondern der Software-Programmierung in der Bilderkennung.
Für die Belange innerhalb des Projektes steht die Programmierung im Rahmen der Bildverarbeitung nicht im Vordergrund, so dass eine kleine Kamera ausreicht. Eine kleine Kamera, welche Grauwerte liefern kann, ist ausreichend.

WinAVR
Benjamin AunkoferWinAVR ist der Compiler, welcher für die Erstellung der Ausgabedateien, die auf dem RP6 verarbeitet werden können, verantwortlich ist. WinAVR muss in AVR Studio eingebunden werden. Die Installation von WinAVR ist sehr einfach und sollte möglichst vor der Installation von AVR Studio geschehen (es funktioniert in der Regel aber auch der umgekehrte Weg).
Zu Problemen kommt es bei 64bit-Systemen (Window Vista 64Bit und Windows 7 64Bit), wenn WinAVR nicht in das Default-Verzeichnis direkt unter dem Systemlaufwerk (typischerweise C:\) installiert wird, sondern – wie für 32bit-Anwendungen gewohnt – im Verzeichnis “Program Files (x86)”.
WinAVR und AVR Studio machen hier Probleme, wenn das Installationsverzeichnis von WinAVR Leerzeichen und/oder Sonderzeichen enthält.
Beim kompilieren mit AVR Studio unter Verwendung von WinAVR macht sich dann folgende Fehlermeldung bemerkbar:
make: Interrupt/Exception caught (code = 0xc00000fd, addr = 0x4217b3
Programmierung – Einrichten von AVR-Studio
Benjamin AunkoferUm den RP6 programmieren zu können, sind einige Vorbereitungen nötig, denn es wird eine Entwicklungsumgebung benötigt. Eine Entwicklungsumgebung ist ein Softwarepaket, welches in der Regel Editor, Präprozessor, Linker, Compiler und einen bestimmten Grundumfang von Standardbibliotheken mitbringt.
Die Programmierung kann mit Software wie Eclipse, diverser C/C++ -Entwicklungsumgebungen, Notepad2 und vieler weiterer Software erfolgen.
Wir nutzen für die Programmierung AVR Studio in der 4. Version. AVR Studio ist kostenlos aber registrierungspflichtig!
Um AVR Studio erfolgreich verwenden zu können, muss das Programm WinAVR installiert sein! WinAVR ist der Compiler, auf welchen AVR Studio zugreift.
Einrichten von AVR Studio
Damit AVR Studio gleich so funktioniert, dass man mit der Programmierung des RP6 losstarten kann, muss man einige Schritte beachten.
AVR-Studio bedient sich einer “makefile”, welche AVR Studio selbst generiert, jedoch auch selbst gestaltet werden kann. Auf diese makefile kommen wir gleich zurück.
Auf den RP6 wird über den Bootloader eine HEX-Datei (Inhalte nur im hexadezimalen Bereich) gespielt, programmieren tun wir jedoch eine c-File in der Programmiersprache C.
Ausgang ist eine Hauptdatei, welche Quellcode der Programmiersprache C beinhaltet und mit der Extension .c endet, in unserem Beispiel Start.c
In diese Start.c kommt zu Beginn folgender Inhalt:
#include “RP6RobotBaseLib.h” // The RP6 Robot Base Library.
// Main-part
int main(void)
{
initRobotBase(); // Always call this first! The Processor will not work
return 0; // Main-function always needs a return value!
}
“Gelenk” – Grundlagen
Daniela MeyerEin Gelenk ist in erster Linie eine bewegliche Verbindung zwischen mindestens zwei festen Körpernm bzw. Maschinenelementen. Ähnlich wie bei einem Lager dient es zur Fixierung einer Konstruktion und wird über den Freiheitsgrad weiter definiert.
Die Funtion eines Gelenkes erfährt jeder durch den eigenen Körper. Das Strecken und Anwinkeln, sowie das Drehen des (Unter-)Armes wird durch den Ellenbogen ermöglicht. Hier fungiert der Ellenbogen als Gelenk, genauer als ein zusammengestztes Gelenk. Der Unterarm teilt sich sich in Elle und Speiche und besitzt daher zwei getrennte Verbindungen zum Oberarm. Das Oberarm-Ellen-Gelenk dient als Schaniergelenk und das Oberarm-Speichen-Gelenk als Kugelgelenk. In der Technik können bestimmte Gelenke im Gegensatz zu organischen Gelenken auch translatorische (Schubgelenk, Freiheitsgrad = 1) Bewegungen zulassen.
Ein Beispiel für alle drei Bewegungsrichtungen, also drei Freiheitsgraden, ist das Kugelgelenk. Es ist durch einen kugelähnlichen Gelenkkopf gekennzeichnet. Der Kopf ermöglich eine Bewegung in alle Richtungen, läßt aber keine translatorischen Bewegung zu.
Ein Gelenk soll also nicht alle inneren Kräfte übertragen, sondern einer bestimmten Kraft nachgeben. So kann eine Beweglichkeit in einer Konstruktion bzw. in einem Tragwerk erreicht werden.
Innere Kräfte, die bestimmte Gelenke nicht übertragen sollen:
Moment: Momente sind die aus gegenläufigen Kräften mit Hebel resultierende Drehkraft
Querkraft: Die Querkraft wirkt vertikal aus Sicht des Koordinatensystems, daher wird sie auch Vertikalkraft genannt
Normalkraft: Die Normalkraft wirkt senkrecht zur Querkraft, also horizontal.
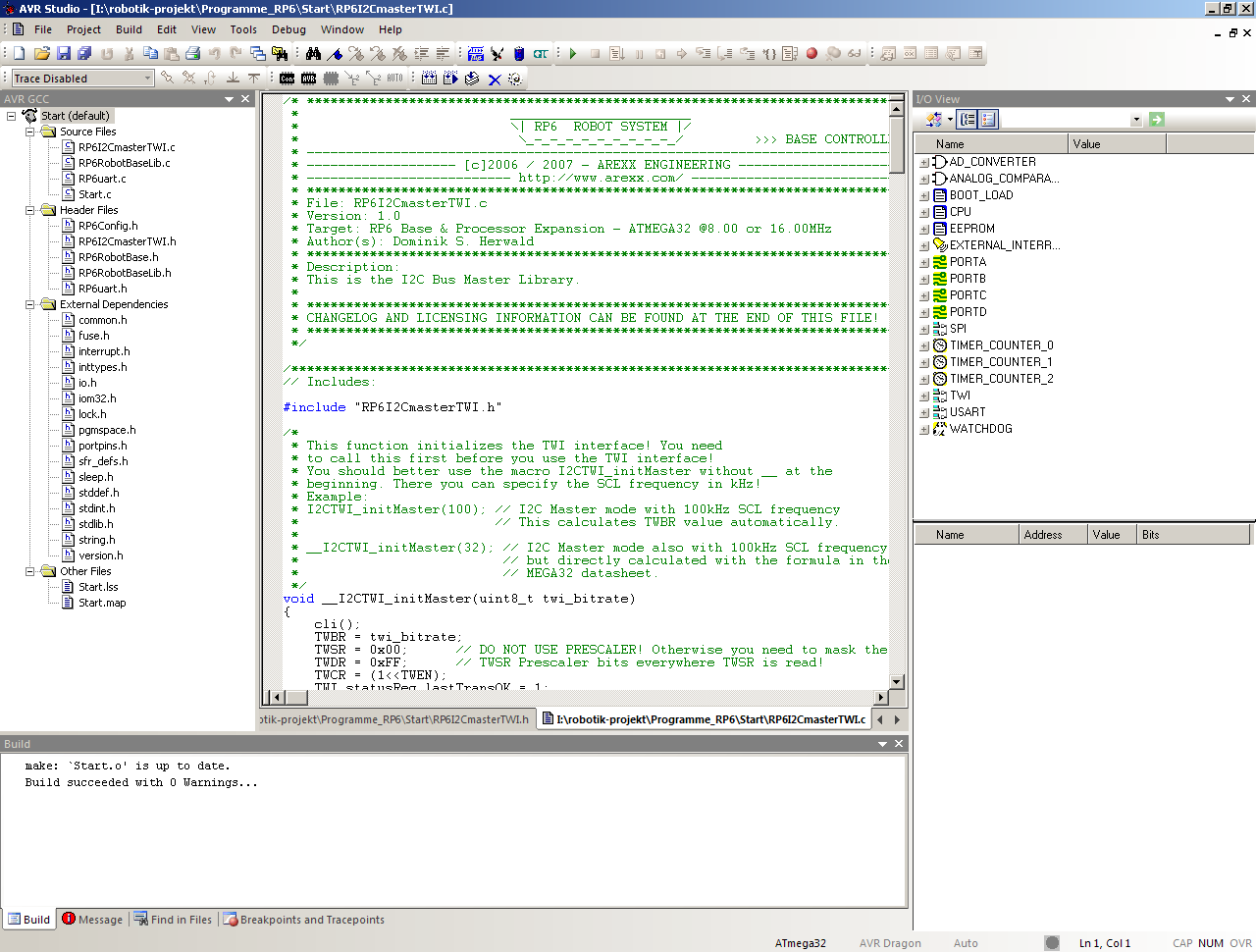
Momentgelenk
Das Momentgelenk überträgt am Knotenpunkt die Querkraft und die Normalkraft. Momente werden nicht übertragen.
An den Stäben können die Quer- und Normalkraft übertragen werden, wenn ihre Wirkungslinie den Knotenpunkt (Kugelgelenk-Zentrum) schneidet. Wirkt eine Kraft auf einen Stab ohne dass die Wirkungslinie den Knotenpunkt schneidet, wird der Stab zum Hebel und setzt die Kraft zum Moment um, welches nicht übertragen wird.
Momentgelenke können z.B. Scharniere sein. Scharniere übertragen jedoch nicht alle Momente, wie es etwa ein Kugelgelenk tut.
Querkraftgelenk
Das Querkraftgelenk überträgt die Normalkraft und auch Momente. Auf eine einwirkende Querkraft (Vertikalkraft) weicht es jedoch aus.
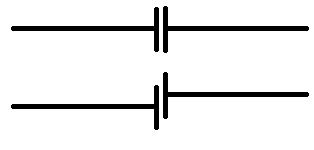
Normalkraftgelenk
Das Gegenstück zum Querkraftgelenk ist das Normalkraftgelenk, welches zwar eine Querkraft und auch Momente überträgt, einer Normalkraft jedoch ausweicht.
Beispiel: Zwei Stäbe sind mit einer Hülse verbunden.
Hinweise:
Die Gelenknamen deuten daraufhin, welche Kraft nicht übertragen wird (ein Momentgelenk überträgt kein Moment etc.).
In der Praxis weichen Gelenke auf eine bestimmte Kraft nicht ohne Energieverlust aus, da jedes Gelenk einen Eigenwiderstand (Reibung etc.) hat.
Die Gelenke sind in ihrem Raum zur Kraftausweichung i.d.R. beschränkt. So ist beispielsweise ein Normalkraftgelenk so gebaut, dass ein Stab durch zu weite Entfernung nicht aus der Hülse fallen kann. Ab einer bestimmten Entfernung trifft es auf einen starken Widerstand, so dass ab dieser Entfernung die weitere Kraft (einseitig) übertragen wird. Wird der Stab in die Hülse geschoben, wird es auf eine Begrenzung stoßen und die weitere Kraft (einseitig) übertragen.
Lager
Daniela MeyerIn diesen Artikel betrachten wir die Lagerung im Sinne der technischen Mechanik und das Lager als verbindendes Maschinenelement.
Technische Mechanik
Hier werden die Lager je nach Lagerform und den jeweiligen Freiheitsgrad unterschieden. Der Freiheitsgrad gibt an, in welche Richtungen sich ein Körper bewegen kann. Befindet sich ein Körper in einer Ebene, wo er frei beweglich ist, so besitzt dieser drei Freiheitsgrade. Er kann in zwei Richtungen translatorische Bewegungen ausführen und hat die Möglichkeit zu rotieren.

Je nach Anzahl der Freiheitsgrade wird unterschieden in:
- einwertiges Lager (kann nur eine Kraft übertragen, z.B. Loslager)
- zweiwertiges Lager (kann zwei Kräfte übertragen, z.B. Festlager)
- dreiwertiges Lager (kann drei Kräfte übertragen, z.B. Einspannung)
Das Lager ist demnach eine Möglichkeit, verschiedene Körper (Konstruktionen) in einer bestimmten/gewünschten Lage zu halten. Hierbei werden Reaktionskräfte freigesetzt, welche als Lagerreaktionen bezeichnet werden. Durch diese wird die Bewegungsfreiheit eingeschränkt oder sogar verhindert. Je nach Wertigkeit des Lagers kann eine translatorische Bewegung oder Rotation reduziert/vermieden werden. Ausgehend vom Lager wirkt eine Kraft, die die translatorische Bewegung behindert, sowie ein Moment, welches eine Drehung verhindern würde.
| Loslager | Festlager | Einspannung |
|---|---|---|
| fixiert einen Freiheitsgrad | fixiert zwei Freiheitsgrade | fixiert alle Freiheitsgrade |
| keine Momentenübertragung | keine Momentenübertragung | Momente werden übertragen |

Maschinenelement
Hier steht das Aufnehmen und Ableiten von Kräften, sowie das Begrenzen für Bewegungen im Vordergrund. Es werden zwei Lagertypen unterschieden:
Gleitlager
Das Gleitlager ermöglicht zwei Körpern (Maschinenelemente) sich aneinander vorbei zu bewegen, sodass eine Gleitbewegung realisierbar ist. Entweder durch direkten Kontakt der Oberflächen oder durch einen trennenden Schmierfilm (Fett, Öl). Weichmetalllager, welche z.B. aus Kupfer oder Zinn bestehen, wirken selbstschmierend. Gleitlager, die aus sehr harten und reibungsarmen Werkstoffen gefertigt worden sind, funktionieren schmierungsfrei.
Wälzlager
Das Wälzlager besteht aus einem Innenring und Außenring, wo sich sogenannte Wälzkörper zwischen befinden. Der Innenring ist z.B. durch Kugeln von dem Außenring getrennt (Kugellager). Die Kugeln sind durch einen Wälzkörperkäfig mit einander verbunden und bewirken eine Wälzbewegung. Dieser Käfig verhindert, dass sich die Wälzkörper berühren oder eine Reibung entsteht. Weitere Wälzkörper sind Zylinder, Kegel, Nadeln und Tonnen.
Radial- und Axiallager
Ebenfalls gibt es eine Unterscheidung der beiden Lagertypen in Radial- und Axiallager. Die Kategorisierung erfolgt je nach Einwirkung der Kräfte. Ein Radiallager nimmt Kräfte, die radial, also senkrecht zur Drehachse wirken, auf und ein Axiallager die, die in Richtung der Achse ausgeübt werden. Kann ein Lager beide Kräfte aufnehmen, so wird es als Radiaxlager bezeichnet.
DC-Motor
Daniela MeyerDC ist die Abkürzung vom englischen direct current und bedeutet Gleichstrom. Demnach ist die deutsche Bedeutung für DC-Motor “Gleichstrommotor”.
Ein Gleichstrommotor ist ein Elektromotor und wird mit Gleichstrom betrieben.
Gleichstrom
→ zeitlich nicht veränderlicher Strom, wobei dessen Stärke und Richtung gleich bleibt [Formelzeichen I]
Aufbau und Funktionsweise
Der DC-Motor ist auf dem Prinzip, dass sich ungleichnamige Pole zweier Magneten anziehen und gleichnamige Pole sich abstoßen, aufgebaut. Die beiden Hauptbestandteile sind der Stator und der Rotor. Der Stator ist ein festes und unbewegliches Teil, wo hingegen der Rotor ein drehbar gelagertes Teil ist. Der Stator besteht aus einem festen Permanentmagneten und der Rotor ist ein rotierender Elektromagnet. Wird der typische Aufbau eines Permanentmagneten (Stator) betrachtet, befindet sich der Elektromagnet (Rotor) im Inneren des Stators. Auf dem Rotor werden eine oder mehrere Spulen montiert, sodass diese, wenn eine Spannung angelegt wird, ein Magnetfeld erzeugen. Ein neues Magnetfeld im bereits vorhandenen Magnetfeld des Permanentmagnetes entsteht. Je nach Polung des vom Elektromagneten erzeugten Magnetfelds kann er sich in die eine oder andere Richtung drehen. Die Umpolung wird von einem Kommutator, auch Stromwender genannt, ausgeführt.

Projekt-geeignete Basis
Benjamin AunkoferZiel des Projekts ist es, einen Roboter mit Greifarm zu realisieren, welcher autonom eine Aufgabe ausführen kann. (Siehe Projektvorstellung)
Das Rad soll aber nicht komplett neuerfunden werden, daher stimmen wir über einen Bausatz ab, der eine Basis bietet, welche technisch im Rahmen des Projekts erweitert wird, um das Projektziel zu erreichen. Diese Basis soll bereits fahren können, jedoch noch über keine Intelligenz und keine mechanischen Vorrichtungen (also kein Greifarm), sondern ausschließlich über die Möglichkeit der Fortbewegung verfügen.
Was muss die Basis können?
Es muss bereits über die mechanischen und elektronischen Bauteile verfügen, um eine Fortbewegung des Roboters im Raum zu ermöglichen. Zudem soll bereits die Basis programmierbar sein (also über mindestens einen Mikrocontroller verfügen).
Gängige Bausätze
Es gibt verschiedene Bausätze und fertig montierte Roboterbasis-Konstruktionen zu kaufen. Einige davon, welche für ein Projekt gegebener Größe in Frage kommen, werden kurz vorgestellt:
ASURO
ASURO (Another Small and Unique Robot from Oberpfaffenhofen) ist ein Bausatz des Deutschen Zentrums für Luft und Raumfahrt, welcher über zwei Räder und einige Sensoren (Lichtsensoren und Taster für die Registrierung der Umwelt sowie Lichtschranken für die Messung der Raddrehzahlen) verfügt.
ASURO wird i. d. R. nicht als Fertig-Bausatz geliefert und muss von den Studenten zum fertigen Roboter montiert werden, was den didaktischen Wert des Bausatzes erhöht.
ASURO verfügt über einen 8Bit-Mikrocontroller (ATmega8 AVR) der Firma Atmel mit einem RISC-Prozessor. Dieser Mikrocontroller ist sehr verbreitet, im Internet gut dokumentiert und dementsprechend einfach programmierbar. Für mechanische Aufbauten dürfte die Plattform des ASURO etwas zu klein sein, ließe sich aber möglicherweise leicht ertweitern bzw. vergrößern. Für ein Projekt mit Konstruktion und Steuerung eines Greifarms scheidet ASURO daher aus.
Projekte, für welche ASURO besonders geeignet ist: Einfache Aufgaben wie das Verfolgen einer Linie bis hin zur Schwarmintelligenz-Entwicklung.
YETI YT-3000
YETI ist der einzige kostengünstige, leicht lieferbare Roboter, welcher nicht auf Räder als Fortbewegungsmittel zurückgreift, sondern eine Art “Beine” ansteuern lassen kann.
YETI wird i. d. R. nicht als Fertig-Bausatz geliefert und muss von den Studenten zum fertigen Roboter montiert werden, was den didaktischen Wert des Bausatzes erhöht.
YETI ist hinsichtlich der Elektronik leicht erweiterbar und verwendet den gleichen Mikrocontroller, wie auch ASURO (ATmega8). Mechanische Aufbauten wie ein Roboterarm etc. sind mit YETI als Basis nur sehr schwer zu realisieren, da YETI einen sehr weit vom Boden entfernten Schwerpunkt hat. Für ein Projekt mit Konstruktion und Steuerung eines Greifarms scheidet YETI daher aus.
Projekte, für welche YETI besonders geeignet ist: Einfache Gehbewegung bis hin zum Hüpfen und Tanzen z. B. nach akustischen oder optischen Mustern.
Pro-Bot 128
Pro-Bot 128 ist ein Roboterbausatz mit zwei Rädern und ähnelt vom Aufbau her besonders dem ASURO, verfügt jedoch über einen ATmega128 Mikrocontroller (128Bit-Microcontroller der Firma Atmel) und bietet, da mehrstöckig aufgebaut, mehr Fläche für Erweiterungen.
Der Pro-Bot 128 wird i. d. R. nicht als Fertig-Bausatz geliefert und muss von den Studenten zum fertigen Roboter montiert werden, was den didaktischen Wert des Bausatzes erhöht.
Für mechanische Aufbauten wie etwa einen Roboterarm ist der Pro-Bot jedoch auch nicht optimal, da die Erweiterungsfläche kaum ausreichend (dafür aber leicht erweiterbar) und der Schwerpunkt des kleinen Roboters zu weit vom Boden entfernt ist. Für ein Projekt mit Konstruktion und Steuerung eines Greifarms scheidet der Pro-Bot daher aus.
Der Pro-Bot 128 ist leistungsfähiger, als ASURO und eignet sich für alle Arten von Projekten, für die auch ASURO gedacht ist (von dem Nachlaufen bestimmter Muster bis hin zur Kommunikation mit anderen Robotern).
RP5
Das RP5 (Robot Project 5) ist ein leistungsfähiger Roboter auf vier Rädern (mit Gummi-Kette unterlegt) und einer der erfolgreichsten Bausätze. Der RP5 wird als Fertigmodell geliefert und basiert auf einem in Basic programmierbaren C-Controll (Conrad Electronic).
Das RP5 ist sehr erweiterbar, bietet ein stabiles Fahrgestell und kann auf Grund des Platzangebots und der Stabilität auch als Basis für mechanische Aufbauten dienen.
Das RP5 steht heute jedoch im Schatten des neueren RP6. Für dieses Projekt wird der RP5 daher keine Verwendung finden.
RP6
Das RP6 ist eine Überarbeitung von RP5. Es wurden mechanische Elemente verbessert, damit das RP6 (gegenüber dem RP5 mit sehr lautem Fahrbetrieb) leiser ist. Zudem verfügt das RP6 jetzt über einen in C programmierbaren 23Bit-Microcontroller der Firma Atmel (Atmega23) und viele weitere Verbesserungen.
Für das RP6 gibt es wie für das RP5 viele Erweiterungssets.
Der RP6 ist für alle Projekte geeignet, welche auf vier Rädern zu bewältigen sind (jedoch ist auch eine Umrüstung auf beinartige Mechanismen denkbar), vom einfachen Verfolgen einer Linie oder anderer Muster bis hin zum Bau eines Roboters mit mechanischen Gliedmaßen sind alle erdenklichen Projekte mit dem RP6 als Basis denkbar. Für dieses Projekt mit Konstruktion und Steuerung eines Greifarms ist RP6 sehr geeignet.
Fazit:
Der Bausatz YETI scheidet aus, da er nicht die notwendige Agilität und Stabilität für mechanische Erweiterungen aufweist.
Für Aufgaben der einfachen Navigation entlang eines Musters bis hin zur Entwicklung einer Schwarmintelligenz sind die Roboter-Bausätze ASURO wie auch Pro-Bot 128 sehr geeignet. Das RP5 und RP6 sind ebenfalls für solche Aufgaben geeignet, bieten zudem die Möglichkeit der Montage mechanischer Aufbauten (z. B. Greifarme), welche für dieses Projekt notwendig ist.
Da das RP6 gegenüber das ältere RP5 verbessert wurde, ist das RP6 für dieses Projekt vorzuziehen.
Kondensator
Benjamin AunkoferKondensatoren sind Ladungsspeicher und ein häufiges Bauteil in elektronischen Geräten, es kommt kaum ein elektronisches Gerät ohne Kondensatoren aus. Kondensatoren werden vor allem als kleiner Energiespeicher (und damit auch als Informationsspeicher), Blindwiderstand oder frequenzabhängiger Widerstand genutzt.
Ein Kondensator ist aufgebaut durch zwei voneinander getrennter bzw. elektrisch isolierter Elektroden (z. B. aus Kupferdraht). Die Isolation der Elektroden geschieht mittels zwischengesetztem Dielektrikum (= fester, flüssiger oder gasförmiger Isolierstoff).

Ein durch einen ungeladenen Kondensator fließender elektrischer Strom lädt eine Elektrode positiv und die andere negativ auf. Diese elektrische Ladung des Kondensators bleibt erhalten, bis eine Entladung erfolgt, die Ladung dem Kondensator also wieder entnommen wird und die Spannung auf Null sinkt.
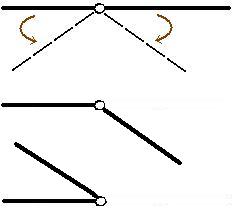
Symbole in Schaltplänen für die häufigsten Kondensatoren:

Ein Kondensator hat eine Kapazität C, welche das Verhältnis von elektrischer Ladung zu elektrischer Spannung angibt. Ein Kondensator entwickelt um so mehr Ladung, je höher die Spannung ist. Zwischen Spannung und Ladung besteht also ein proportionales Verhältnis. Wie viel Ladung der Kondensator jedoch bei einer bestimmten Spannung aufnimmt, hängt von der Konstante C (die Kapazität) ab. Je höher die Kapazität des Kondensators, desto stärker steigt die Ladung im Kondensator bei Erhöhung der Spannung.

Die Kapazität C wird in der Einheit Farad [F] angegeben. Ein Kondensator hat einen Farad (1F), wenn bei einer anliegenden Spannung von einem Volt (1V) eine Ladung von einer Amperesekunde (1As = 1 Coulomb) resultiert.
Prozessorarchitekturen CSC und RISC
Benjamin AunkoferEs gibt zwei maßgebende Architekturprinzipien in der Mikroprozessortechnologie, RISC und CISC.
Den Grundunterschied zwischen beiden Prinzipien werden bereits durch die Namensgebung klar.
RISC (Reduced Instruction Set Computing)
RISC arbeitet mit einem geringeren Grundbefehlssatz (maximal 128) aus weniger komplexen Befehlen, welche maximal vier Befehlsformate haben können. Das macht Programmausführungen mit einem RISC-Prozessor flexibler, da die Befehlsausführungszeit geringer ist. Durch geringe Befehlsausführungen können die Rechenvorgänge des Prozessors schneller und somit auch flexibler unterbrochen werden.
Da sich der Befehlssatz auf das Nötigste beschränkt und die jeweiligen Befehle so (gegenüber den Befehlen der CISC-Architektur) kurz und außerdem einheitlich lang bleiben, wird auch das Dekodieren der Befehle in kürzerer Zeit möglich. RISC-Prozessoren haben gegenüber den CISC-Prozessoren verhältnismäßig viele Register (kleinster, aber schnellst adressierbarer/ansprechbarer Speicher, welcher sich innerhalb des Prozessors befindet), was die Rechengeschwindigkeit weiterhin erhöht.
Der Code für einen RISC-Prozessor ist weniger kompakt als der eines CISC-Prozessors, denn die vielen Befehle, welche nur für eine mittelmäßig komplexe Anweisung notwendig sind, blähen den Code geradezu auf.
CISC (Complex Instruction Set Computing )
CISC-Prozessoren kamen nach den RISC-Prozessoren und begründeten sich vor allem durch eine Zeit des teuren Arbeitsspeichers und des nicht vorhandenen Cache-Speichers. So wurden viele komplexe Befehle (welche selbst aus mehreren effektiven Befehlen bestehen und unterschiedliche Größen haben können) direkt im Mikroprogrammspeicher des Mikroprozessors gespeichert, die Architektur um spezialisierte Register, viele Befehlsformate und Adressierungen erweitert. CISC-Prozessoren hatten sich in der Vergangenheit besonders bei Großrechnern durchgesetzt, aber auch in kleinere (End-)Geräten wurden CISC-Prozessoren integriert, insbesondere durch Hersteller wie IBM, Intel und Motorola.
CISC vs RISC – Keine Frage der Zukunft
Heute sind reine CISC-Prozessoren kaum in Verwendung, aber auch reine RISC-Prozessoren sind heute kein Trend mehr. Heutige Prozessoren sind meistens RISC-Prozessoren, welche sich in ihrer Architektur auch an CISC-Prozessoren anlehnen. Die Prozessoren finden sich heute im Taschenrechner, der digitalen Kamera, im PC usw. auch das aktuell IPhone von Apple nutzt einen Prozessor, der mehr RISC- als CISC-Prozessor ist.
Die Differenzierung von RISC und CISC ist aktuell und auch in Zukunft nicht mehr notwendig, da sich die Hersteller nicht mehr nur für eine Philosophie entscheiden, sondern anforderungsgemäß Architekturen entwickeln, die Elemente aus CISC wie auch aus RISC enthalten, wobei die RISC-Eigenschaften meistens überwiegen mögen.
Integrierter Schaltkreis: Mikrocontroller
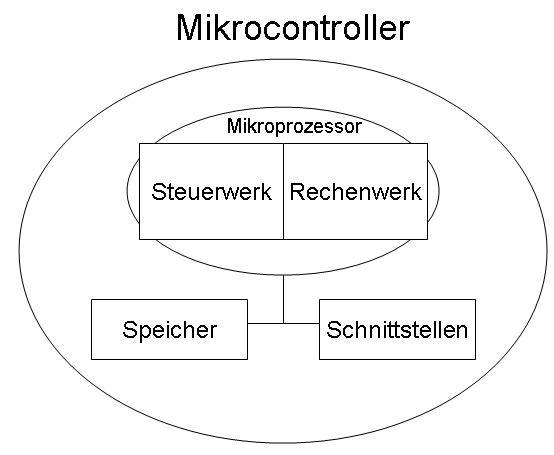
Benjamin AunkoferMikrocontroller (auch oft mit “µc” abgekürzt) sind elektronische Bauteile, mit welchen sich komplexe Aufgaben über eine Programmierung abarbeiten lassen. Mikrocontroller sind eine besonders komplexe Form der integrieten Schaltkreise (IC – Integrated Circuit).
Mikrocontroller bestehen grundsätzlich aus einem (oder mehreren) Mikroprozessoren und einer Menge an Peripheriebauteilen (Schnittstellen, AD-Wandler, Speicher usw.), wobei alle Elemente gemeinsam in einem Bauteil (“Mirkochip”) vereint sind und nach außen hin als ein Bauteil erscheinen. Das Bauteil ist in der Regel mit einem oberflächenmontierten Kunststoffgehäuse verdeckt, welches den Mirkocontroller vor leichten Umwelteinflüssen schützt und die Montage mit herausstehenden Lötanschlüssen (“Beinchen”) erleichtert.
 mit Gehäuse auf einem Steckbrett")
Die Lötanschlüsse, welche aus dem Kunststoffgehäuse herausstehen, können direkt in eine Schaltung gelötet oder in einen Sockel gesteckt werden. Ein Sockel erleichtet die Montage und Demontage des Mikrocontrollers, nur der Sockel ist dann noch durch Lötgut fest in der Schaltung integriert. Der Sockel erleichtert den Austausch des Mikrocontrollers enorm, was keine unerhebliche Rolle spielt, da Mikrocontroller sensible Bauteile sind, welche sehr schnell (Überspannung, Falschpolung usw.) beschädigt werden kann.


Mikroprozessoren (CPU – Central Processing Unit, ebenfalls eine eigene Form integrierter Schaltkreise) sind Rechen- und Steuerwerke und somit der Kern jeden Mikrocontrollers.
In der Technologiegeschichte sind Mikrocontroller jünger als Mikroprozessoren. Dadurch, dass Mikroprozessoren dank moderner Produktionstechnik immer weiter miniaturisiert werden konnten, konnten Peripherieeinheiten ebenfalls in den Chip integriert werden und stellen nach außen hin eine einzige Einheit da, so sind die Mikrocontroller entstanden.
Heutige Mikroprozessoren verfügen neben dem Prozessorkern (Steuer- und Recheneinheit) auch über etwas Peripherie, beispielsweise einen Cache-Speicher, was zur Folge hat, dass die Grenzen zwischen Mikroprozessoren und Mikrocontroller immer mehr ineinander fließen.
Grundsätzlich sind Mikroprozessoren eher allgemeine Rechen- und Steuerwerke, Mikrocontroller bieten hingegen zusätzliche Peripherie. Mikrocontroller sind entweder allgemein (universelle Auslegung) gestaltet oder (häufiger) für einen sehr speziellen Zweck in der Automatisierungs- und Nachrichtentechnik ausgelegt (z. B. Steuerung eines elektronischen Verriegelungssystems). Kommunikations- und Steuerungsaufgaben in elektronischen Geräten (z. B. Radio, Kaffeemaschine, Telefon, Waschmaschine oder im Auto-Steuergerät) werden in der Regel von Mikrocontrollern übernommen.